
Mars, also known as the red planet, has been the focus of numerous research studies, as some of its characteristics have sparked discussions about its possible inhabitability. The National Aeronautics and Space Administration (NASA) and a few other space agencies have thus sent a number of rovers and other spacecraft to Mars with the hope of better understanding its geology and environment.
Source: Tech Xplore
Mars, also known as the red planet, has been the focus of numerous research studies, as some of its characteristics have sparked discussions about its possible inhabitability. The National Aeronautics and Space Administration (NASA) and a few other space agencies have thus sent a number of rovers and other spacecraft to Mars with the hope of better understanding its geology and environment.
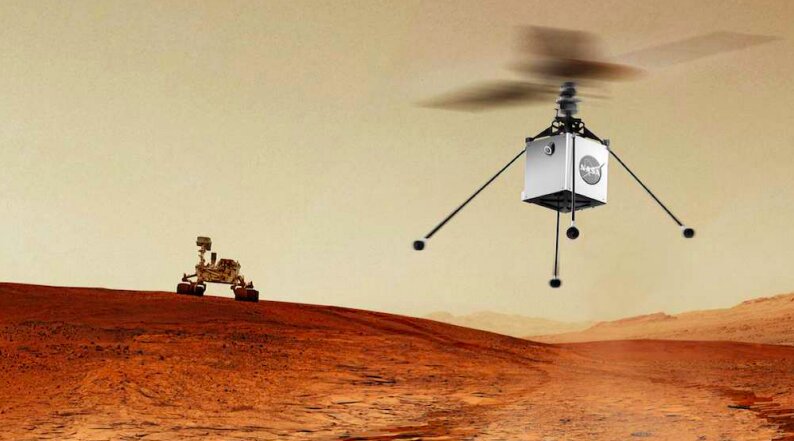
NASA has recently been planning a new mission called Mars 2020, which entails sending a helicopter to Mars, alongside conventional ground rovers. While the main objective of this mission is to test the feasibility of operating the helicopter on the red planet, if successful, it could open up new possibilities for Mars exploration. In other words, this mission could pave the way toward other missions involving the deployment of Mars copters, which may be able to produce more information about the ground, terrain and obstacles ahead of the rovers.
Researchers at NASA’s Jet Propulsion Lab (JPL), Japan Aerospace Exploration Agency and Eindhoven University of Technology have recently introduced the design for a three-agent robotic system that could further enhance future Mars explorations. This system, presented in a paper published in IEEE Robotics and Automation Letters, is composed of a Mars rover, a copter and an orbiter.
“In addition to conventional ground rovers, the Mars 2020 mission will send a helicopter to Mars,” the researchers write in their paper. “The copter’s high-resolution data helps the rover to identify small hazards such as steps and pointy rocks, as well as providing rich textual information useful to predict perception performance. In this letter, we consider a three-agent system composed of a Mars rover, copter and orbiter.”
The ultimate objective of the new three-agent system is to identify an optimal path for the ground rover, which minimizes the localization uncertainty that accumulates as the rover moves in a given direction. The researchers found that the localization performance can be increased by selectively driving over types of terrain that are easy to localize (i.e., that have good localizability).
In their study, they thus used a localizability map captured by remote satellite technology to carry out a space search that combines the rover’s path with the copter’s actions, aimed at gathering rich data about the surrounding environment. In addition to the localizability map, the system considers the dynamic map updates collected by the copter.
“In other words, we jointly address where to map by the copter and where to drive by the rover, in order to minimize the uncertainty accumulation in rover localization,” the researchers explain in their paper.
So far, the team has demonstrated the effectiveness of the system in a series of numerical simulations, including both single-run and Monte Carlo simulations. These simulations were based on the map of the Mars 2020 mission landing site and were specifically designed to evaluate the effectiveness of the planner in reducing localization uncertainty when exploring Mars via a three-agent robotic system.
The researchers found that their approach could reduce localization uncertainty during rover path planning by 10 to 20%, while a random mapping approach led to less than 10% gain in uncertainty reduction. In the future, their system could help to optimize the use of copters to enhance rover navigation during Mars exploration missions by considering the actions of the rover and copter in conjunction.
Existing copters would only be able to fly on Mars for a short amount of time, as their use of high-speed rotors would consume large amounts of power. Optimizing this flight time and ensuring that the copter gathers as much valuable information as possible is thus of key importance, as it could greatly increase the probability of a mission being successful.
In their next studies, the researchers plan to explore techniques that may allow a rover to identify the best times to map the surrounding environment, to further enhance the effectiveness of the overall copter-rover system. In addition, they wish to conduct further experiments aimed at testing the effectiveness of the collaborative multi-agent system they proposed.
Source: Tech Xplore


























Leave a Comment
You must be logged in to post a comment.