

A tiny model robot slogs over terrain that would stop simpler bots in their tracks
Source: Science News
A truly all-terrain rover on the moon or Mars may need to put a little wiggle in its walk.
Wheeled rovers have trouble crossing the soft soil that covers large swaths of lunar and Martian terrain. NASA’s Spirit rover, for example, met its end after getting stuck in a sand trap on Mars in 2009. But a new rover design could spare future robotic explorers that fate.
The new rover model can move its four wheels up and down and sweep them back and forth. In lab experiments, a mini plastic version of the rover used combinations of wheel sweeping and spinning to trundle up hills of loose grains that would stop a simple wheeled bot in its tracks, researchers report May 13 in Science Robotics. Future rovers based on this design could scout out slopes of soft lunar soil near the moon’s poles for resources like water ice or explore other similar areas.
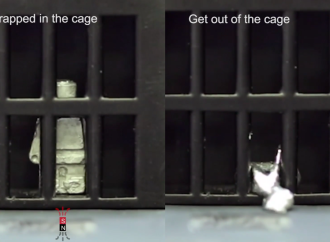
Physicist Daniel Goldman of Georgia Tech in Atlanta and colleagues tested the mini rover in a tilted bed of poppy seeds meant to roughly mimic lunar soil. Just spinning the rover’s wheels on even a shallow incline caused the vehicle to sink into the seeds and get stuck. But spinning the wheels and sweeping them back in a paddling motion allowed the rover to scoot forward — at least for shallow slopes.
To reliably climb hills with sharper inclines, steeper than about 15 degrees from horizontal, the rover had to switch up its strategy. The vehicle spun its two front wheels to shove seeds ahead of it under its belly, effectively lowering the slope of the hill the rover had to climb. Meanwhile, the rover’s back wheels paddled side to side, kicking seeds from underneath the rover to behind it, allowing the vehicle to trudge uphill.
Source: Science News


























Leave a Comment
You must be logged in to post a comment.