
There was a time when explorers in Egypt were more than happy to carry out their excavations by dismantling the ancient artifacts around them, sometimes even using dynamite to blast through obstacles in their search for hidden chambers.
Fortunately, here in 2017, we have significantly better ways of performing these kind of explorations — and significantly smarter technology to do it.
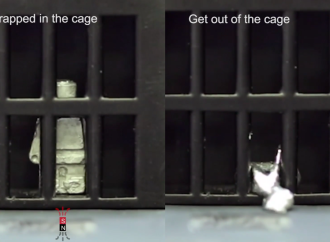
Recently, we wrote about how researchers used muon imaging technology to discover an enormous hidden chamber inside the Great Pyramid of Giza. As we noted at the time, however, in order to fully explore the space it’s necessary to use other tech, such as flying drones. This is where a new phase of the project comes into play. Working with the group ScanPyramids, research institutions Inria and the French National Center for Scientific Research are currently developing a blimp-like exploration robot, designed to squeeze through a tiny 1.5-inch hole, before unfolding and inflating itself to look around.
“The main challenge is to insert a complete exploration robot in a hole that is as small as possible,” Dr. Jean-Baptiste Mouret, a senior researcher at Inria, told Digital Trends. “It is important to use a hole as small as possible because we want to leave as few traces as we can. This what we call ‘minimally invasive robotics.’ We chose a diameter of 1.5 inches because it is a good trade-off between the size of the hole, the kind of machines that can bore holes, and the current robotics technologies.”
Mouret said the blimp-like form factor for the robot was selected because it is more versatile in this scenario than a wheeled or legged robot would be, while also offering more potential points of view for surveying the scenery. He explained that the blimp model was chosen over more conventional multi-rotor drones because it is safer for the surroundings it will be exploring. “[These robots] can touch obstacles without crashing and without risking damage to the monument,” he continued. “They are, moreover, intrinsically stable, which is important for taking pictures in low-light conditions, and they are more energy-efficient than multi-rotors.”
The camera-equipped robot will be remote-controlled by radio so that archaeologists will be able to precisely control where it goes and what it sees. Should it lose communication or need to land on its docking station, though, it can move autonomously, via tiny on-sensors.
At present, Mouret said there is no “concrete timeline” for deploying the robots inside the pyramid, which will require the necessary permits from Egypt’s Ministry of Antiquity. However, once the robot is completed it could be useful not for this mission, but also helping to map other heritage buildings and archaeological sites around the world.
Source: Digital Trends


























Leave a Comment
You must be logged in to post a comment.